Other products
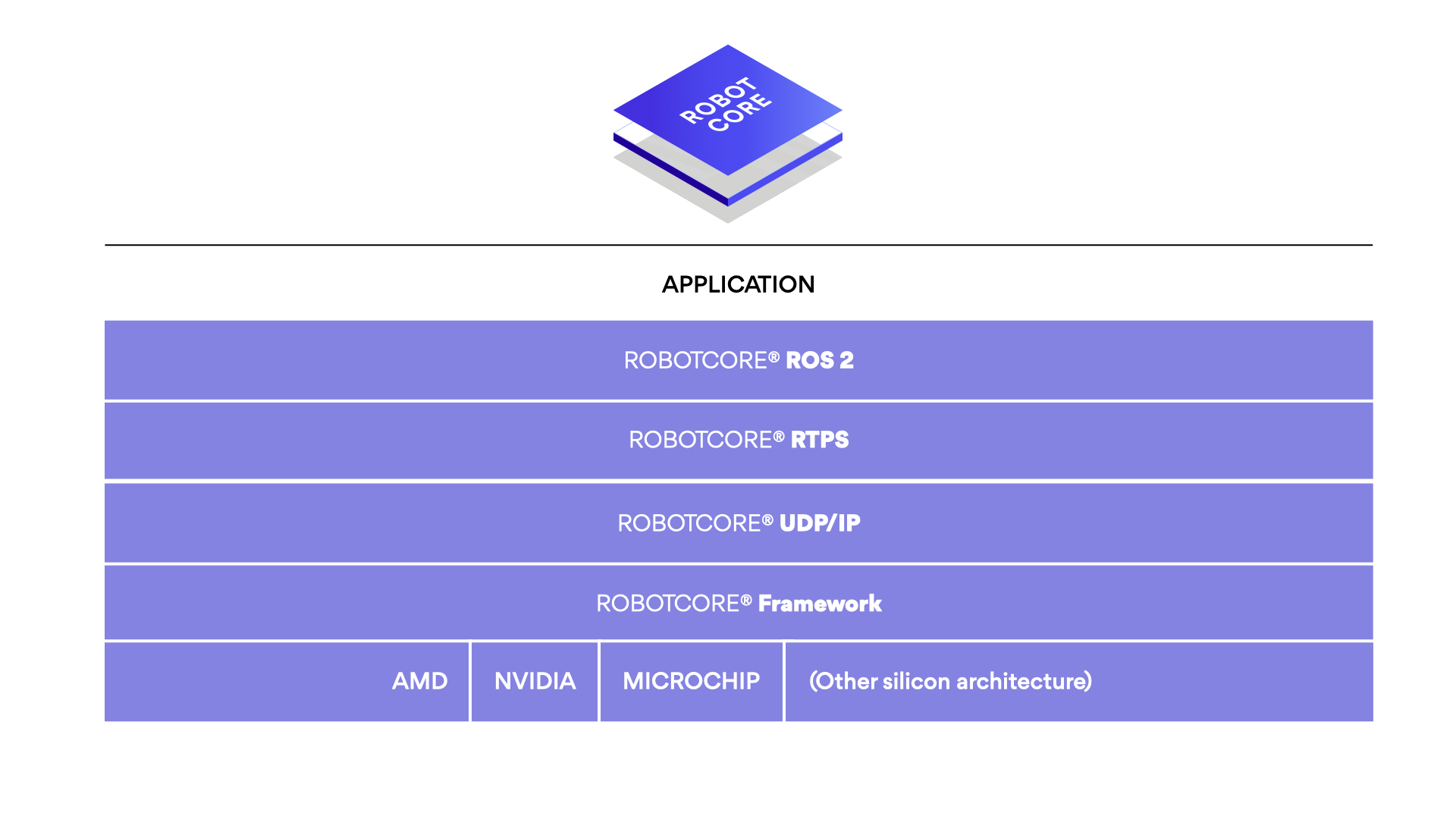
ROBOTCORE RTPS
An FPGA implementation of DDS-RTPS for Real-Time Robotics Networking
ROBOTCORE® RTPS is an expertly crafted FPGA robot core (also known as IP core) that implements in hardware the Real-Time Publish Subscribe (RTPS) protocol, the communication backbone of the Data Distribution Service (DDS), and by extension, ROS 2. ROBOTCORE® RTPS interoperates with popular DDS implementations and its hardware design is central to facilitating fast, real-time, efficient networking data distribution within DDS and ROS 2's sophisticated ecosystem, providing a robust foundation for advanced robotic communications. With the capability to send or receive small DDS payloads in about 1.5 microseconds in off-the-shelf FPGAs, it achieves a remarkable 26x speedup on average over traditional CPU software implementations of RTPS and DDS.
Get ROBOTCORE® RTPS Benchmarks